
Merge branch 'main' of git.beagleboard.org:docs/docs.beagleboard.io
Branches
Tags
Showing
- boards/beagleplay/demos-and-tutorials/zephyr-cc1352-development.rst 13 additions, 1 deletion...gleplay/demos-and-tutorials/zephyr-cc1352-development.rst
- books/beaglebone-cookbook/11misc/figures/gateway-start.png 0 additions, 0 deletionsbooks/beaglebone-cookbook/11misc/figures/gateway-start.png
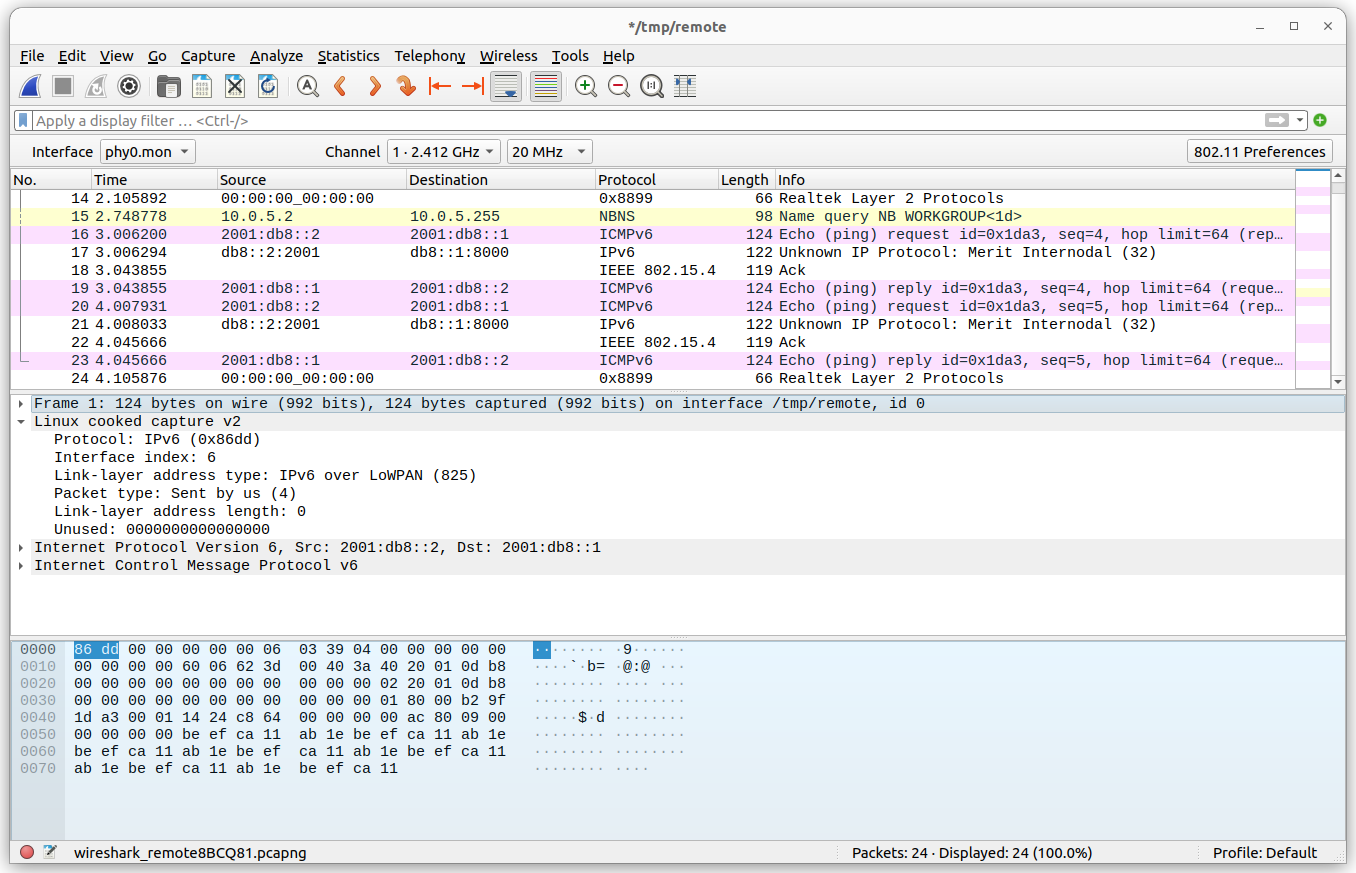
- books/beaglebone-cookbook/11misc/figures/wireshark_ping.png 0 additions, 0 deletionsbooks/beaglebone-cookbook/11misc/figures/wireshark_ping.png
- books/beaglebone-cookbook/11misc/misc.rst 181 additions, 1 deletionbooks/beaglebone-cookbook/11misc/misc.rst
- index-tex.rst 1 addition, 0 deletionsindex-tex.rst
- index.rst 1 addition, 0 deletionsindex.rst
- intro/blinkLED.rst 171 additions, 0 deletionsintro/blinkLED.rst
- intro/putty.png 0 additions, 0 deletionsintro/putty.png
{kind=link}

439 KiB
{kind=link}
192 KiB
intro/blinkLED.rst
0 → 100644
intro/putty.png
0 → 100644
{kind=link}

19.5 KiB